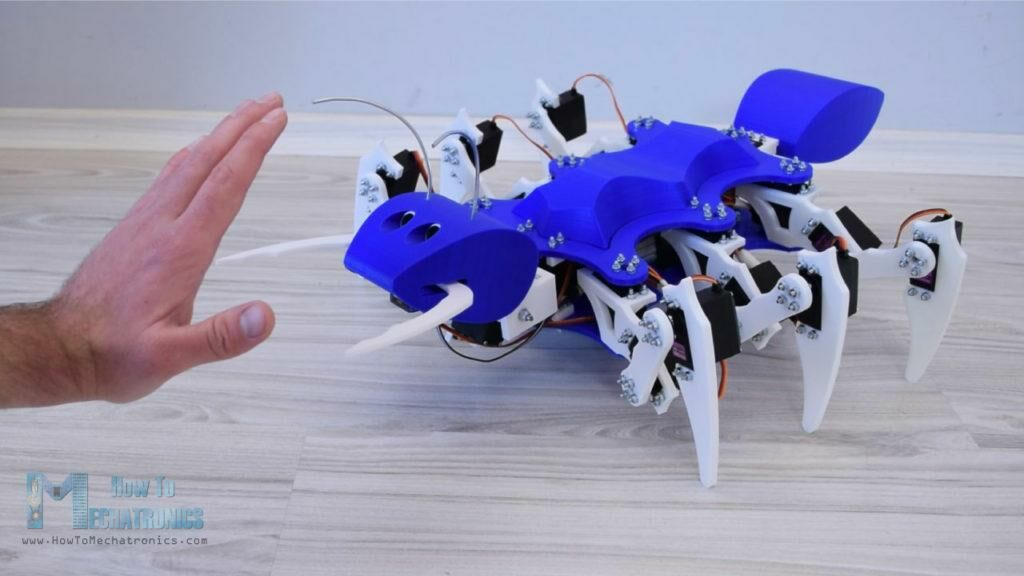
六足机器人并不是什么新鲜事,但是你见过这款制作简单、容易上手的3D打印的Arduino蚂蚁机器人吗?

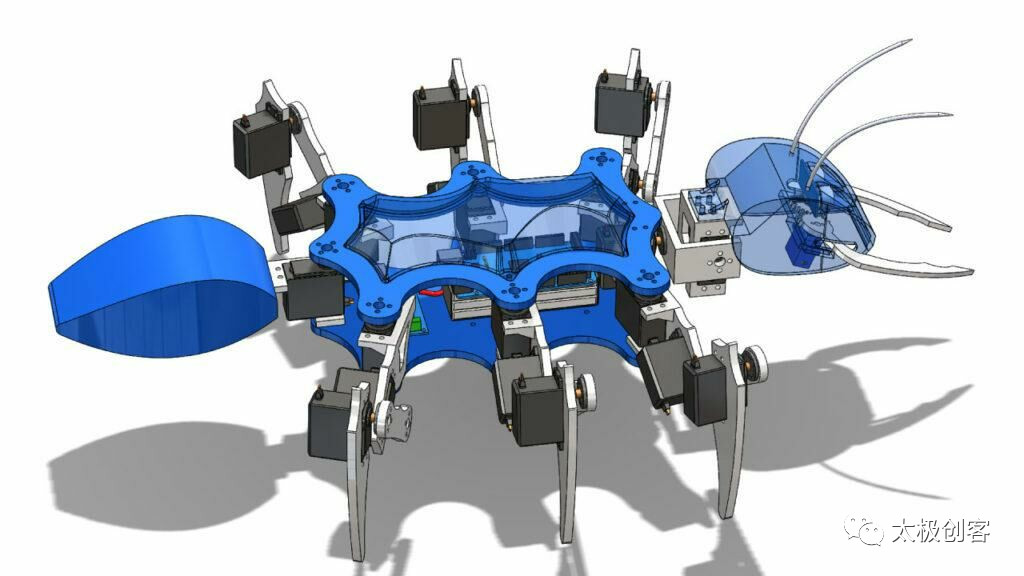

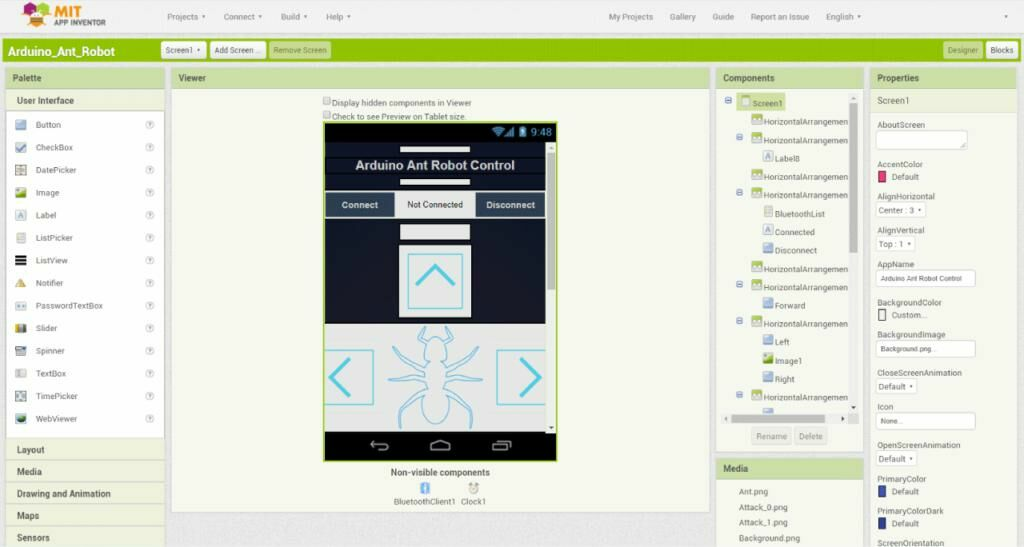
这个项目所有资料都是开源的(三维模型、APP源文件、Arduino源代码),您甚至可以对其进行二次开发,制作属于你自己的小六足,属于你自己的动作组哦!
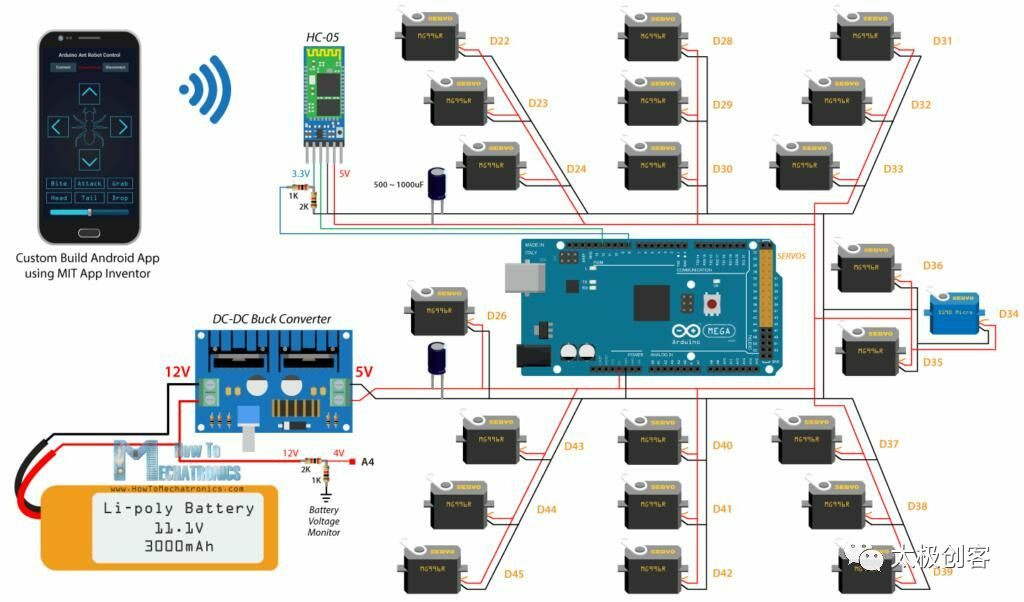
这是该项目的电路图,虽然由于有许多舵机连接,看起来有点复杂,但实际上很简单。除了22个舵机外,我们还需要一个太极创客教程机械臂篇里将到过的HC-05(06)蓝牙模块以及一些电容和电阻。控制器采用的是MEGA2560 ,因为它是唯一可以使用超过12个舵机的Arduino控制板。
-
-
- MG996R伺服电机
- SG90微伺服电机
- HC-05蓝牙模块
- Arduino Mega Board(2560)
- 3SLiPo电池
- DC-DC降压模块
-