本期太极创客为大家介绍的是很多创客朋友们都热衷的机械臂,机械臂分好多种。在这里,有跟MeArm相似的MK2机械臂、相比之下MK2在体积、载重、稳定性等方面都更加优秀!
也有步进电机驱动的机械臂,并带有PC端上位机,可轻松实现示教再现(动作记录)、搬运等功能;更有机器视觉实现抓取的机械臂……总有一款您喜欢的。
MK2 机械臂
 Arduino MK2 机械臂
Arduino MK2 机械臂
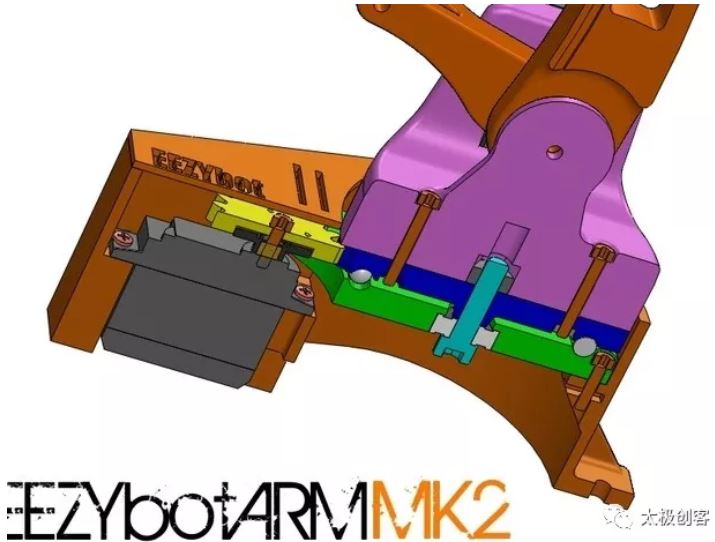
这是一个3D打印机械臂臂,它是由以前较小的一个EEZYbotARM的版本迭代所得,所以简单地称它为MK2。
 Arduino MK2 机械臂
Arduino MK2 机械臂
它更大更强,而且比EEZYbotARM具备更大的有效载荷。它没有明确的设计目的,为的只是给教育提供合适的硬件。
 Arduino MK2 机械臂
Arduino MK2 机械臂
它以 ABB公司出品的 IRB 460工业机械臂为原型等比缩小(比例为1:7)。采用MG995舵机驱动,并且带有蓝牙APP上位机。上手难度不高,推荐新手。
MK2 机械臂资料下载(百度网盘)
提取码:aavb
搬运 机械臂
 Arduino 搬运机械臂
Arduino 搬运机械臂
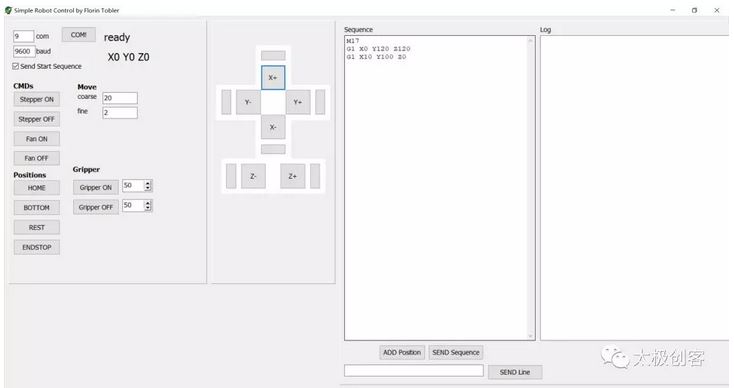
这个开源的3自由度机械臂项目是基于步进电机控制的,由3个42步进电机,1个28BYJ-48步进电机组成,传动方式采用齿轮啮合,具有更高的精度;
 Arduino 搬运机械臂
Arduino 搬运机械臂
在主控板方面由Arduino Mega2560配合3D打印机扩展板RAMPS1.4/1.5;在驱动器方面,42步进电机由TB6560或A4988驱动;
 Arduino 搬运机械臂
Arduino 搬运机械臂
该机械臂的固件里写有3自由度机械臂的运动学算法,有基础的DIY爱好者可自行解读,然后根据自己的需要进行二次开发;同时该项目开发者还开发PC端上位机,使我们可以用电脑连接控制板来操作3自由度机械臂。
搬运机械臂资料下载(百度网盘)
提取码:3om6
视觉抓取机械臂
 Arduino 视觉抓取机机械臂
Arduino 视觉抓取机机械臂
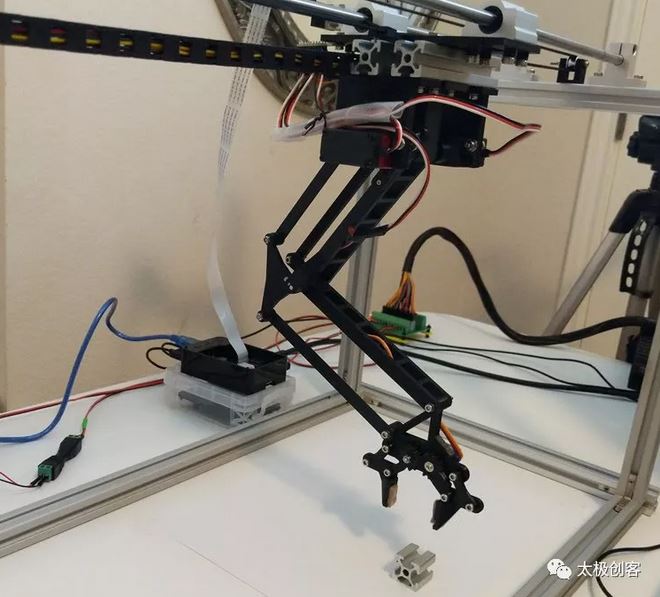
这是一种非常灵活的设计,配合摄像头可实现视觉抓取,并可以根据需要进行加强和改进。
 Arduino 视觉抓取机械臂
Arduino 视觉抓取机械臂
正如您所见,这款机械臂上手难度较大,不建议新手制作,需要有一定开发经验、技术以及经费加持。
 Arduino 视觉抓取机械臂
Arduino 视觉抓取机械臂
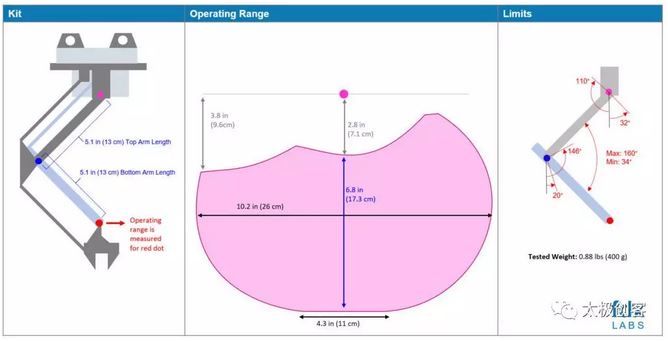
有效范围是在每个130毫米臂的未端测量(如图中红点所示)。操作范围与标准机械臂非常相似,但正如您在上图看到的,它旋转了90度,沿Y轴的位移更大。
臂可以支持广泛的运动,但由于其设计而具有一些机械限制。这些计算已经考虑在操作范围内,上图显示了您可以从该模型中获得的角度范围。
视觉抓取机械臂资料下载(百度网盘)
提取码:7lmg
<-返回太极创客博客目录