本项目资料整理/文档制作:本布衣
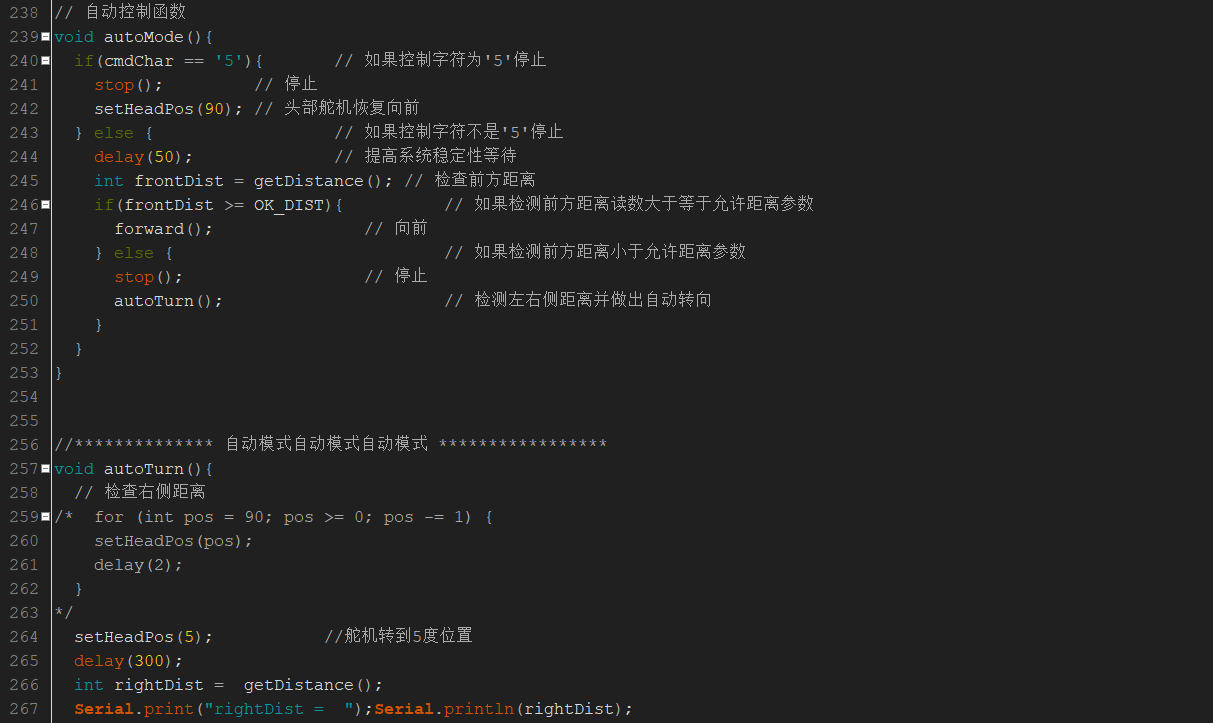
本项目源码下载链接: 链接: https://pan.baidu.com/s/1soQTeIyaR6qlF_a7dH54-w 提取码: 7nfu
原作者:Volos Projects(https://www.youtube.com/watch?v=lOz_GuME63E)
每一位星球大战的粉丝,第一次见到“Death Star” 这样直径160公里的巨大空间站时,应该都会感到十分的震撼。作为银河帝国的超级武器,它拥有可以摧毁行星的超级激光武器。通过强大的离子引擎网,死星可以在超空间内穿越银河。

国外的这位星战粉丝Volos Projects,则使用Arduino Nano制作了一款星球大战风格的游戏,我们通过按键控制自己的飞船对抗强大的死星,在发射激光的同时,我们也要时刻躲避来自死星的攻击。飞船最多可以抵御五次攻击,每隔45秒游戏难度就会提升一级,死星会缩小并提升移动速度。
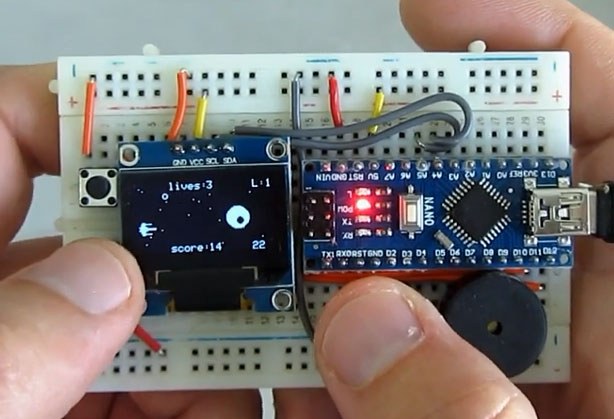
接下来就请跟随我们,完成这个有趣项目的制作吧。
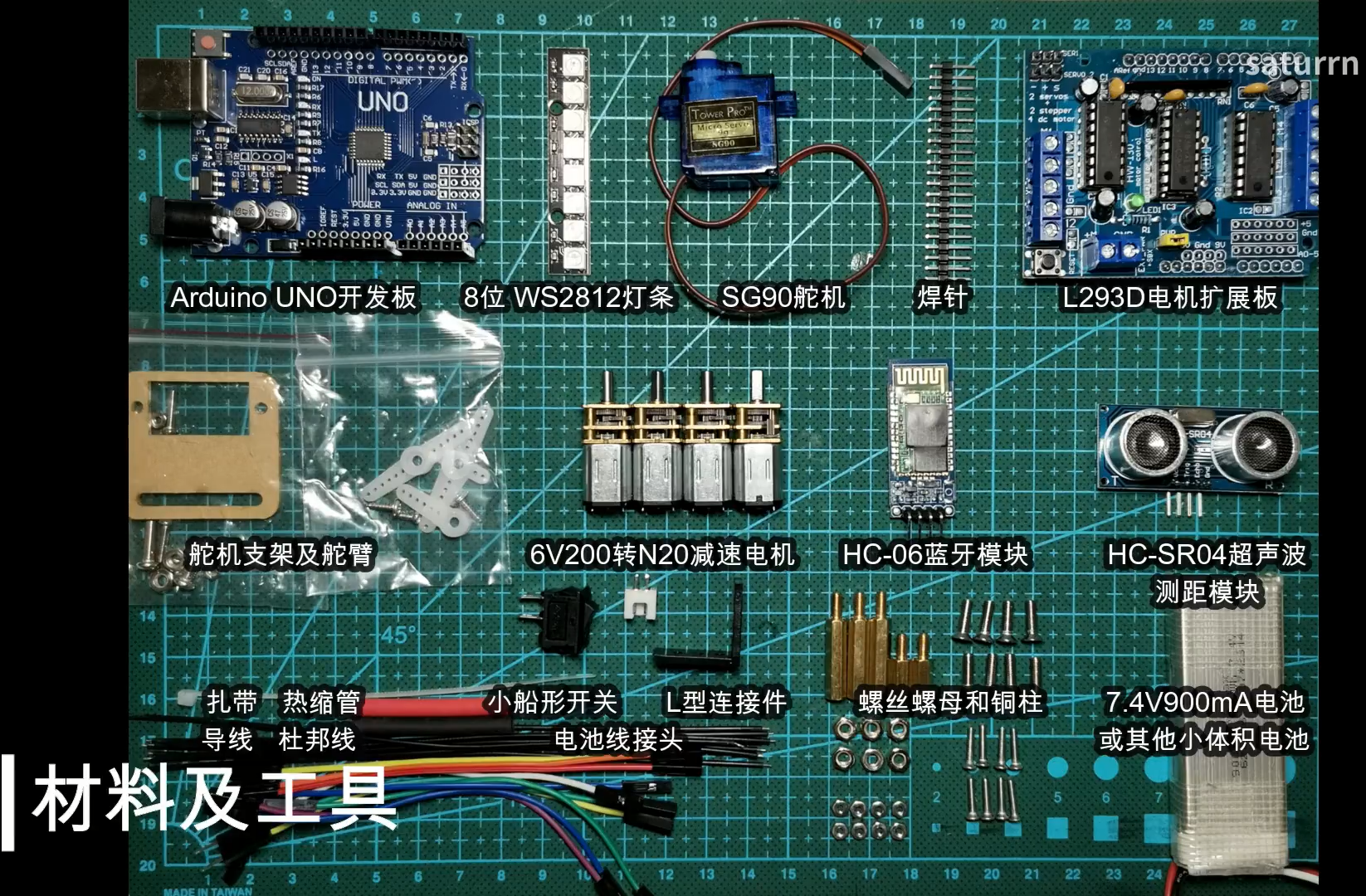
项目材料

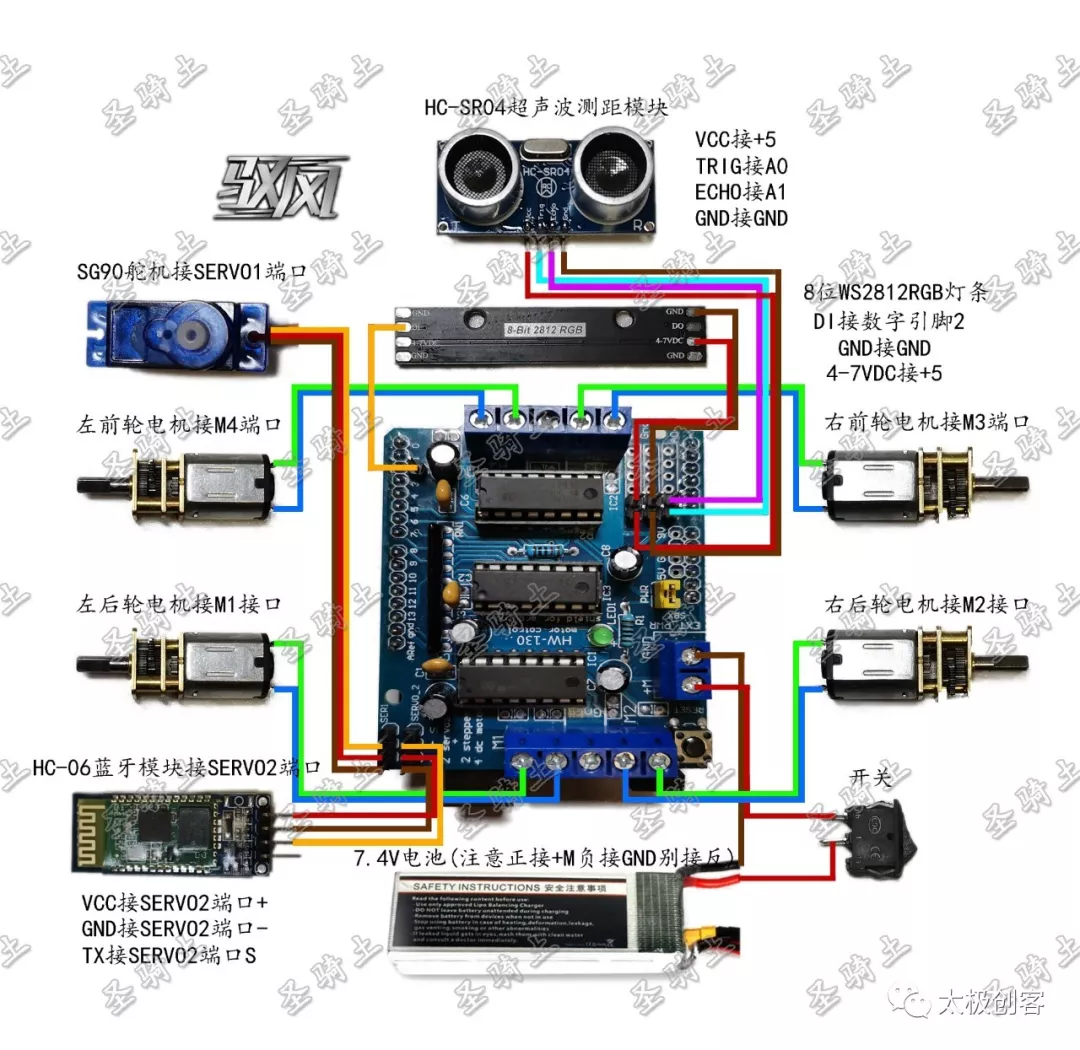
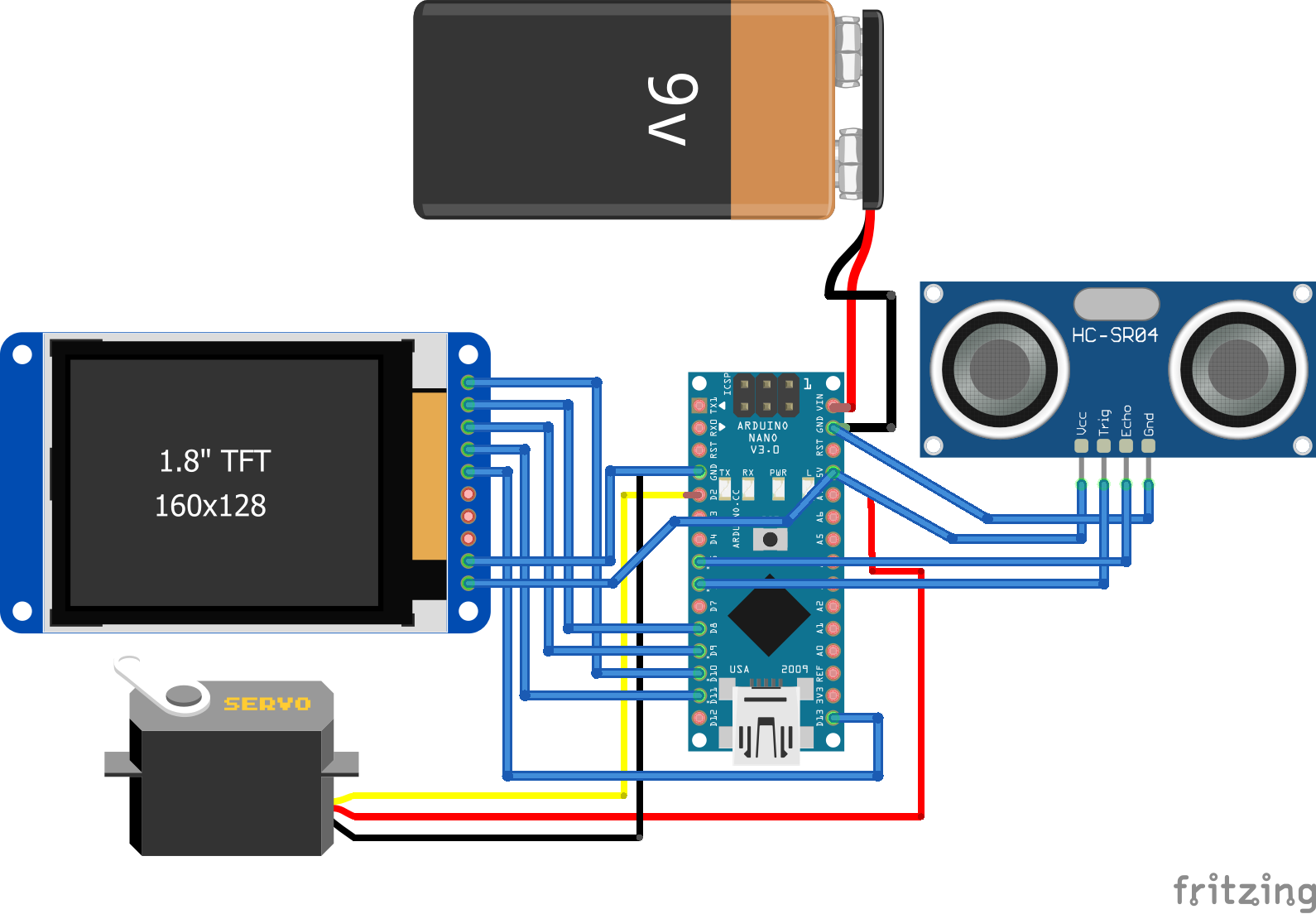
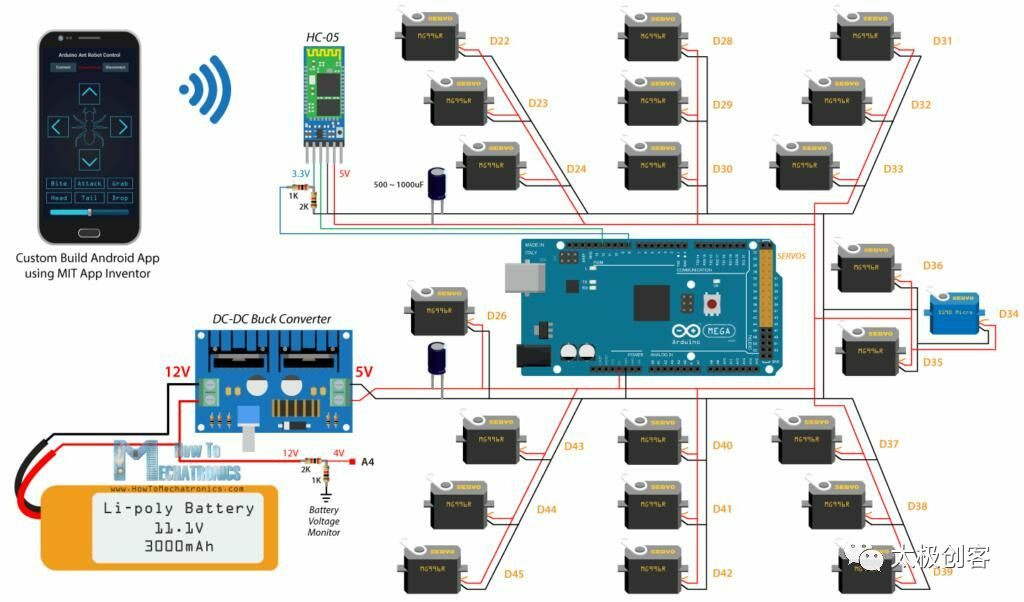
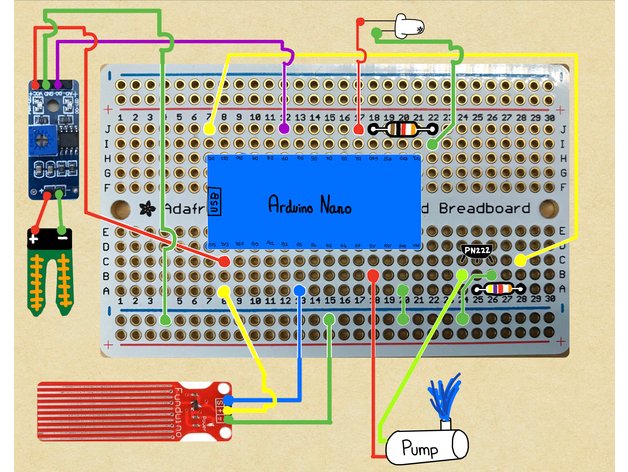
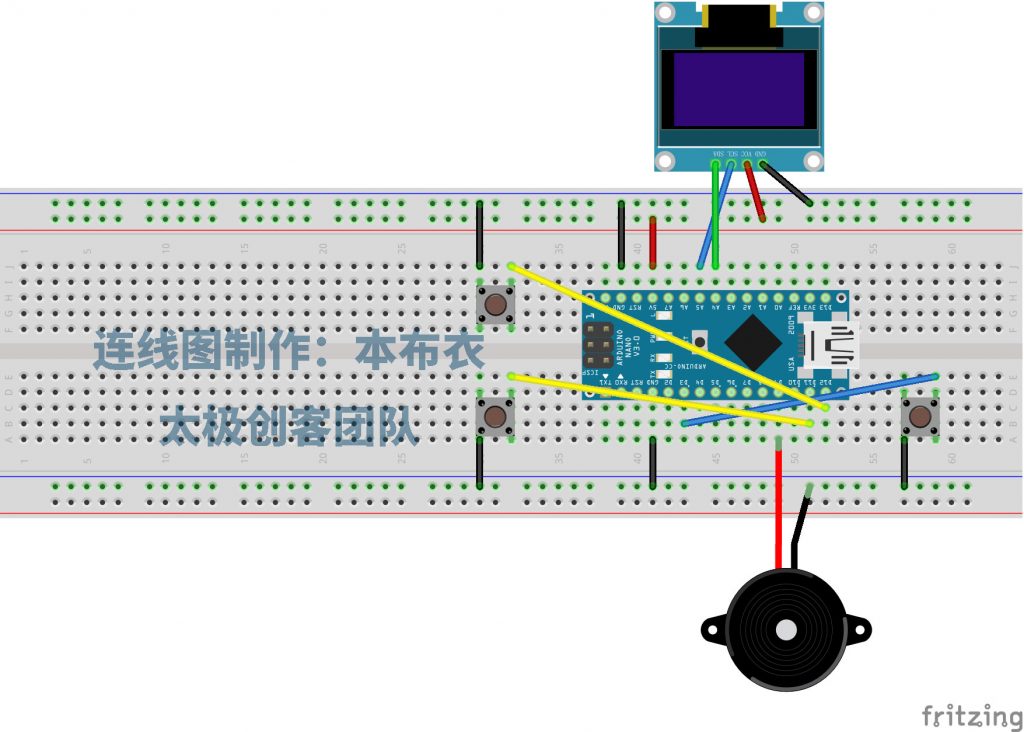
连线图
第三方库文件
– Adafruit_Circuit_Playground
– Adafruit_SSD1306_Wemos_OLED-master
以上库文件可在资源压缩包中获取,请将库文件复制到arduino安装目录下的library文件夹下,如果您已经拥有以上库文件,请替换成我们提供的库文件,因为此库文件包含了字体文件。
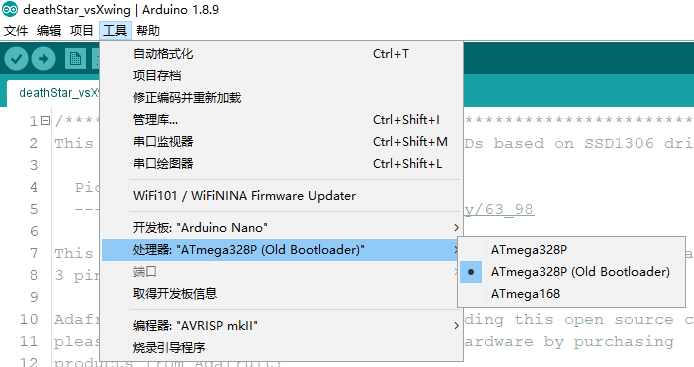
安装好库文件后,便可将deathStar_vsXwing文件夹中的源文件上传到arduino nano中。如果出现烧录失败,可以尝试在工具/处理器中修改为ATmega328P(Old Bootloader)。
我们太极创客团队开发制作了一系列零基础Arduino入门教程。自2016年发布至今已经受到众多新老创客朋友们的好评。只要您有一颗想学习的心,我们就有信心带您走进创客的世界!