由于视频插件兼容性的原因,我们的教程在一些浏览器(如Google Chrome等)中无法播放,如果您遇到这一问题,请更换使用其它浏览器浏览本页面或前往以下网址获取到我们的全部教程内容:
https://space.bilibili.com/103589285#!/
本课使用手机蓝牙应用下载(百度网盘下载)
请注意:假如您想要使用蓝牙模块控制机械臂,那么请先认真学习本教程的全部内容。否则您很可能无法成功通过本节教程的程序实现蓝牙模块控制机械臂的操作。
本课内容:
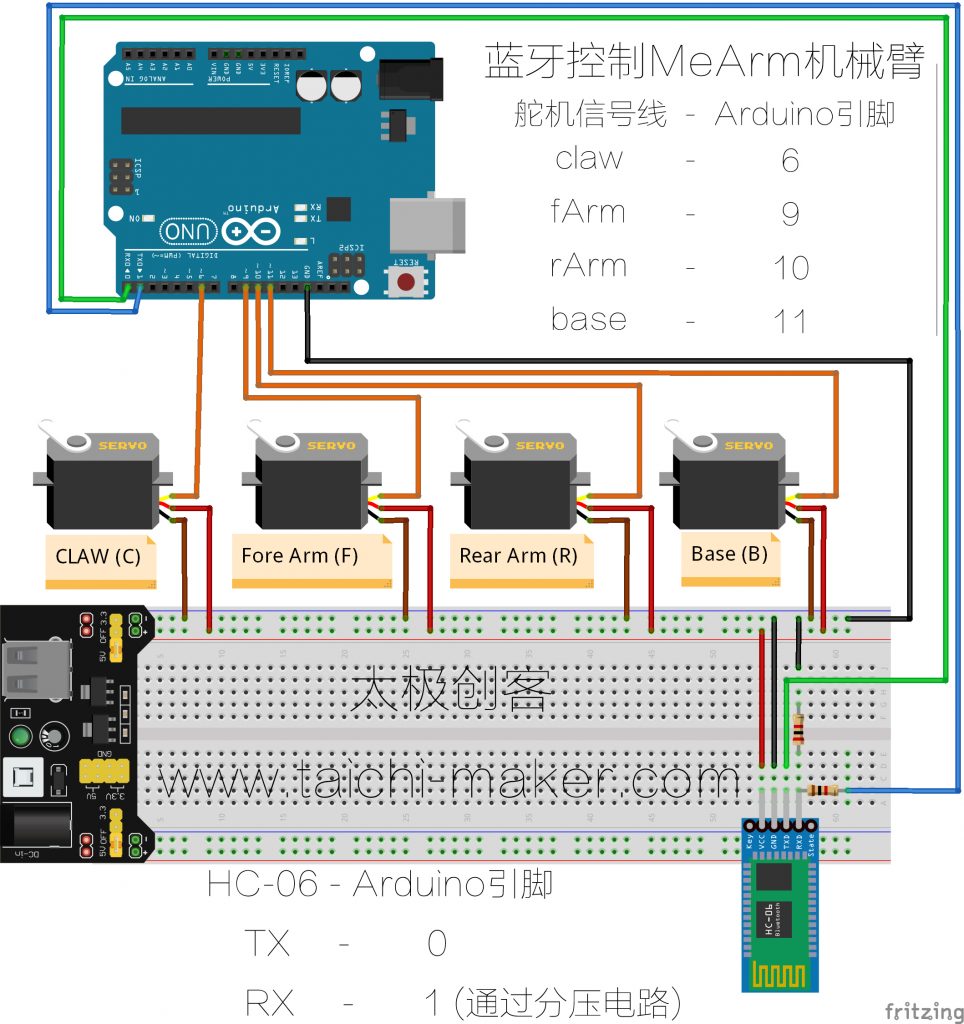
+ 使用无线蓝牙控制MeARm机械臂的电路连接
+ HC-06蓝牙模块的应用配置
+ 用手柄模式通过无线蓝牙控制Arduino机械臂
+ 用终端模式通过无线蓝牙控制Arduino机械臂
假如您在寻找蓝牙模块控制机械臂程序,那么请注意:
本教程使用的蓝牙模块控制机械臂程序与零基础入门学用Arduino教程(MeArm 篇) – 16 开发机械臂程序-3这节课,课程结束的程序是相同的。如果您感到奇怪,为何蓝牙模块控制程序和这节课使用的串口控制机械臂程序是相同的。那么说明您还没有仔细看我们的教程。这里我简单说一下程序相同的原因。
本教程介绍的HC-06蓝牙模块可以将手机等蓝牙设备发送来的信号转换为串口信息,然后蓝牙模块通过串口通讯的形式与Arduino进行通讯。因此本教程使用的蓝牙模块控制机械臂程序与零基础入门学用Arduino教程(MeArm 篇) – 16 开发机械臂程序-3这节课,课程结束的程序是相同的。
假如您无法理解以上文字内容,那么强烈建议您认真观看本教程后,再来尝试使用蓝牙模块来控制机械臂。
蓝牙串口控制机械臂程序:(无法复制本站示例程序代码?请点击这里获得解决方法。)
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 |
/* 蓝牙模块控制程序(MeArm机械臂控制程序-6 ) by 太极创客 (2017-06-02) www.taichi-maker.com 本程序用于太极创客《零基础入门学用Arduino教程 - MeArm篇》。 1 使用串口获得电机数据,设置机械臂动作 将串口指令解读改写为函数,加入状态汇报函数reportStatus 2 加入servoCmd函数控制电机速度 3 加入判断人类指令是否超出舵机限值 4 MeArm执行一系列动作(执行程序) armIniPos - 1 (一维数组) 5 MeArm执行一系列动作(执行程序) armIniPos - 2 (二维数组) 6 加入手柄控制模式 加入机器判断:人类输入信息错误检查 如需要获得具体电路连接细节,请查阅太极创客制作的 《零基础入门学用Arduino教程 - MeArm篇》页面。 */ #include <Servo.h> //使用servo库 Servo base, fArm, rArm, claw ; //创建4个servo对象 //存储电机极限值(const指定该数值为常量,常量数值在程序运行中不能改变) const int baseMin = 0; const int baseMax = 180; const int rArmMin = 45; const int rArmMax = 180; const int fArmMin = 35; const int fArmMax = 120; const int clawMin = 25; const int clawMax = 100; int DSD = 15; //Default Servo Delay (默认电机运动延迟时间) //此变量用于控制电机运行速度.增大此变量数值将 //降低电机运行速度从而控制机械臂动作速度。 bool mode; //mode = 1: 指令模式, mode = 0: 手柄模式 int moveStep = 3; // 每一次按下手柄按键,舵机移动量(仅适用于手柄模式) void setup(){ base.attach(11); // base 伺服舵机连接引脚11 舵机代号'b' delay(200); // 稳定性等待 rArm.attach(10); // rArm 伺服舵机连接引脚10 舵机代号'r' delay(200); // 稳定性等待 fArm.attach(9); // fArm 伺服舵机连接引脚9 舵机代号'f' delay(200); // 稳定性等待 claw.attach(6); // claw 伺服舵机连接引脚6 舵机代号'c' delay(200); // 稳定性等待 base.write(90); delay(10); fArm.write(90); delay(10); rArm.write(90); delay(10); claw.write(90); delay(10); Serial.begin(9600); Serial.println("Welcome to Taichi-Maker Robot Arm Tutorial"); } void loop(){ if (Serial.available()>0) { char serialCmd = Serial.read(); if( mode == 1 ){ armDataCmd(serialCmd); //指令模式 } else { armJoyCmd(serialCmd); //手柄模式 } } } void armDataCmd(char serialCmd){ //Arduino根据串行指令执行相应操作 //指令示例:b45 底盘转到45度角度位置 // o 输出机械臂舵机状态信息 //判断人类是否因搞错模式而输入错误的指令信息(指令模式下输入手柄按键信息) if ( serialCmd == 'w' || serialCmd == 's' || serialCmd == 'a' || serialCmd == 'd' || serialCmd == '5' || serialCmd == '4' || serialCmd == '6' || serialCmd == '8' ){ Serial.println("+Warning: Robot in Instruction Mode..."); delay(100); while(Serial.available()>0) char wrongCommand = Serial.read(); //清除串口缓存的错误指令 return; } if (serialCmd == 'b' || serialCmd == 'c' || serialCmd == 'f' || serialCmd == 'r'){ int servoData = Serial.parseInt(); servoCmd(serialCmd, servoData, DSD); // 机械臂舵机运行函数(参数:舵机名,目标角度,延迟/速度) } else { switch(serialCmd){ case 'm' : //切换至手柄模式 mode = 0; Serial.println("Command: Switch to Joy-Stick Mode."); break; case 'o': // 输出舵机状态信息 reportStatus(); break; case 'i': armIniPos(); break; default: //未知指令反馈 Serial.println("Unknown Command."); } } } void armJoyCmd(char serialCmd){ //Arduino根据手柄按键执行相应操作 //判断人类是否因搞错模式而输入错误的指令信息(手柄模式下输入舵机指令) if (serialCmd == 'b' || serialCmd == 'c' || serialCmd == 'f' || serialCmd == 'r'){ Serial.println("+Warning: Robot in Joy-Stick Mode..."); delay(100); while(Serial.available()>0) char wrongCommand = Serial.read(); //清除串口缓存的错误指令 return; } int baseJoyPos; int rArmJoyPos; int fArmJoyPos; int clawJoyPos; switch(serialCmd){ case 'a': // Base向左 Serial.println("Received Command: Base Turn Left"); baseJoyPos = base.read() - moveStep; servoCmd('b', baseJoyPos, DSD); break; case 'd': // Base向右 Serial.println("Received Command: Base Turn Right"); baseJoyPos = base.read() + moveStep; servoCmd('b', baseJoyPos, DSD); break; case 's': // rArm向下 Serial.println("Received Command: Rear Arm Down"); rArmJoyPos = rArm.read() + moveStep; servoCmd('r', rArmJoyPos, DSD); break; case 'w': // rArm向上 Serial.println("Received Command: Rear Arm Up"); rArmJoyPos = rArm.read() - moveStep; servoCmd('r', rArmJoyPos, DSD); break; case '8': // fArm向上 Serial.println("Received Command: Front Arm Up"); fArmJoyPos = fArm.read() + moveStep; servoCmd('f', fArmJoyPos, DSD); break; case '5': // fArm向下 Serial.println("Received Command: Front Arm Down"); fArmJoyPos = fArm.read() - moveStep; servoCmd('f', fArmJoyPos, DSD); break; case '4': // Claw关闭 Serial.println("Received Command: Claw Close Down"); clawJoyPos = claw.read() + moveStep; servoCmd('c', clawJoyPos, DSD); break; case '6': // Claw打开 Serial.println("Received Command: Claw Open Up"); clawJoyPos = claw.read() - moveStep; servoCmd('c', clawJoyPos, DSD); break; case 'm' : //切换至指令模式 mode = 1; Serial.println("Command: Switch to Instruction Mode."); break; case 'o': reportStatus(); break; case 'i': armIniPos(); break; default: Serial.println("Unknown Command."); return; } } void servoCmd(char servoName, int toPos, int servoDelay){ Servo servo2go; //创建servo对象 //串口监视器输出接收指令信息 Serial.println(""); Serial.print("+Command: Servo "); Serial.print(servoName); Serial.print(" to "); Serial.print(toPos); Serial.print(" at servoDelay value "); Serial.print(servoDelay); Serial.println("."); Serial.println(""); int fromPos; //建立变量,存储电机起始运动角度值 switch(servoName){ case 'b': if(toPos >= baseMin && toPos <= baseMax){ servo2go = base; fromPos = base.read(); // 获取当前电机角度值用于“电机运动起始角度值” break; } else { Serial.println("+Warning: Base Servo Value Out Of Limit!"); return; } case 'c': if(toPos >= clawMin && toPos <= clawMax){ servo2go = claw; fromPos = claw.read(); // 获取当前电机角度值用于“电机运动起始角度值” break; } else { Serial.println("+Warning: Claw Servo Value Out Of Limit!"); return; } case 'f': if(toPos >= fArmMin && toPos <= fArmMax){ servo2go = fArm; fromPos = fArm.read(); // 获取当前电机角度值用于“电机运动起始角度值” break; } else { Serial.println("+Warning: fArm Servo Value Out Of Limit!"); return; } case 'r': if(toPos >= rArmMin && toPos <= rArmMax){ servo2go = rArm; fromPos = rArm.read(); // 获取当前电机角度值用于“电机运动起始角度值” break; } else { Serial.println("+Warning: rArm Servo Value Out Of Limit!"); return; } } //指挥电机运行 if (fromPos <= toPos){ //如果“起始角度值”小于“目标角度值” for (int i=fromPos; i<=toPos; i++){ servo2go.write(i); delay (servoDelay); } } else { //否则“起始角度值”大于“目标角度值” for (int i=fromPos; i>=toPos; i--){ servo2go.write(i); delay (servoDelay); } } } void reportStatus(){ //舵机状态信息 Serial.println(""); Serial.println(""); Serial.println("+ Robot-Arm Status Report +"); Serial.print("Claw Position: "); Serial.println(claw.read()); Serial.print("Base Position: "); Serial.println(base.read()); Serial.print("Rear Arm Position:"); Serial.println(rArm.read()); Serial.print("Front Arm Position:"); Serial.println(fArm.read()); Serial.println("++++++++++++++++++++++++++"); Serial.println(""); } void armIniPos(){ Serial.println("+Command: Restore Initial Position."); int robotIniPosArray[4][3] = { {'b', 90, DSD}, {'r', 90, DSD}, {'f', 90, DSD}, {'c', 90, DSD} }; for (int i = 0; i < 4; i++){ servoCmd(robotIniPosArray[i][0], robotIniPosArray[i][1], robotIniPosArray[i][2]); } } |